1:22
Fully Automated Beads Art Assembly based on Dynamic Compensation Approach
Ishikawa Group Laboratory
0:59
A sealant dispensing robot for applications with moving targets
1:19
Accurate and Robust Inter-vehicle Distance Estimation with Stereo High-speed Vision
0:57
Robot System for Manipulating a Randomly Placed Towel-like Object
1:13
Proximity sensor-based High-speed Tracking and High-precision Depth Scanning
0:51
High-speed UAV Delivery System with Non-stop Parcel Handover Using High-speed Visual Control
1:06
High-speed Grasping of a Card using New Actuator MagLinkage
1:39
High-Speed Ring Insertion by Dynamic Observable Contact Hand
0:49
Dynamic Human-Robot Interaction -Realizations of collaborative motion and peg-in-hole-
1:08
Rubik's Cube Manipulation Using a High-speed Robot Hand
1:20
High-speed, Non-deformation Catching with High-speed Vision and Proximity Feedback
3:01
Human-Robot Collaboration Based on Dynamic Compensation
1:42
High-Speed Catching of a Paper Balloon using High-Performance Proximity Sensor
1:33
ACHIRES: Robust Bipedal Running Based on High-speed Visual Feedback
1:11
Accurate pick-and-place under uncertainties by a dynamic compensation robot
1:31
ACHIRES: Improved Running Taking Dynamically Unstable Posture Achieved with High-Speed Vision
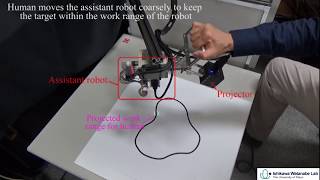
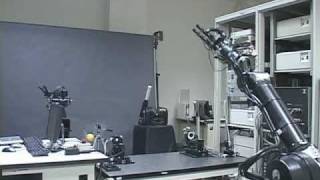
Active Assistant Robot - human robot cooperation based on a new high-speed vision
1:09
Dynamic Compensation Robot with a Newly Developed High-speed Vision Chip
Fully Automatic Robotic Tracking of Uncertain Contours
1:23
Fully Automatic Peg-and-Hole Alignment Based on Dynamic Compensation
2:06
Dynamic Compensation - Toward the Next-Generation Industrial Robot
1:17
Human-Robot Cooperation for Micrometer-Order Manipulation Using High-Speed Vision
1:01
Robotic Button Spinner – Manipulation of High-speed Rotating Object via Twisted Thread
Janken (rock-paper-scissors) Robot with 100% winning rate: 3rd version
2:25
Toward the Dream of a Baseball Android
1:07
ACHIRES: Bipedal Running Using High-speed Visual Feedback
5:01
Ultra High-speed Robot Based on 1 kHz Vision System
0:58
Janken (rock-paper-scissors) Robot with 100% winning rate: 2nd version
Janken (rock-paper-scissors) Robot with 100% winning rate
1:14
Running Progress - The History of Project ACHIRES -
0:56
(no narration version) ACHIRES: Bipedal Running Using High-speed Visual Feedback
0:27
Batting Motion
0:47
High-speed Dribbling
0:24
High-speed Hand
0:41
Throwing & Batting Robot
Throwing & Batting Robot (full ver.).wmv
0:23
3D catching with tweezers
0:22
Egg Catching
0:26
Pen Spinning
0:30
Dynamic Regrasping
0:29
High-speed Catching System
0:18
Knotting of a Rope
0:20
Grasping with Tweezers
0:44
Active Catching
Directional Hitting
Throwing motion