GIM software by COMPMECH research group
Compmech ResearchGroup |
39 videos |
Updated 8 years ago
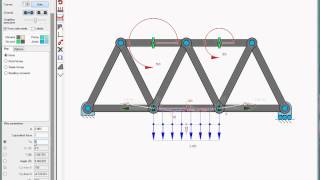
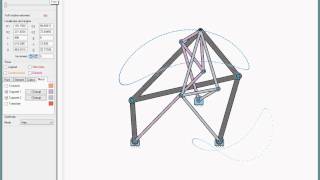
GIM is a registered software for the kinematic analysis of planar and spatial mechanisms and static analysis of planar structures, created by the COMPMECH research group in the University of the Basque Country UPV/EHU. The software is licensed under the assumption that it will only be used for educational purposes, no profitable task should be performed with it, and the owners do not assume any liability for the use of the software.
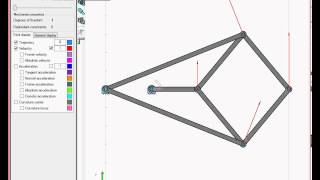
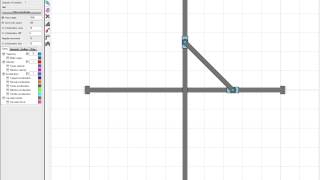
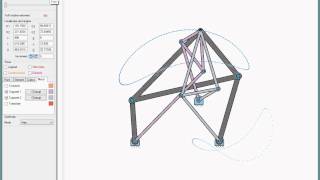
Mechanisms with n-ary elements joined by revolute and prismatic pairs can be introduced. The position problem is solved iteratively using a numerical method, several of its conditions can be controlled and visualized. Inputs can be introduced with a polynomial up to the quintic, so position, velocity and acceleration can be specified at motion extremes. Paths of points and the area swept by an element can be plotted. Velocities and accelerations can be obtained and depicted as the motion is performed, also graphs and tables with this data can be plotted. Every kinematic construction can be demonstrated, instantaneous centre of rotation, fixed and moving polodes, acceleration pole, acceleration circles, and so on.
The software can be downloaded here:
www.ehu.eus/compmech/software/