 Robot Brigade
Robot Brigade
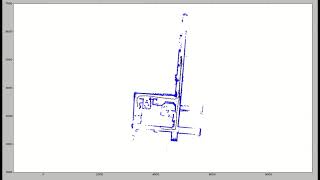
A while ago I posted a short video of the results of a robot being driven around manually while recording range data with a spinning distance sensor. Several people had asked for me to post my code. I didn't write all of that code though so I decided to create a new robot that I could use as a test bench which would do a similar thing but with entirely my own code. The previous robot used a map that was essentially a bitmap. The big problem with that is that you can't have too big of a map. This new robot will save the original scans along with the location where the scan was taken. If a map is needed, one can be generated from those scans at whatever grid size you want within whatever bounds you want.
Code will be located here: github.com/jack-buffington/mappingRobot
I'll be posting some videos periodically from now on talking about my progress and how things work at that time. (Updated 9/20/21)












Shared 2 years ago
113 views



Shared 3 years ago
655 views




Shared 10 years ago
2.4K views



















Shared 11 years ago
135K views







Shared 11 years ago
33K views

Shared 11 years ago
67K views


Shared 11 years ago
22K views

Shared 11 years ago
119K views

